辛 徳 教 授

専門分野 生体信号処理 リハビリロボット BMI/BCI
担当科目 材料力学 モータ工学 ロボット実験 ロボット制作 工学基礎実験
・ウェアラブルロボット研究室: http://wrlab.t-kougei.ac.jp/
・研究業績:https://researchmap.jp/shinduk
研究概要
野球選手がボールを受け取る,音楽家がバイオリンを弾く時など,日常生活の様々な作業において,このような環境との相互作用は脳が腕の粘弾性を巧みに制御するから可能になります. ウェアラブルロボット研究室では脳波や筋電信号など様々な生体信号を処理し,ロボットを制御する手法を研究しています.最近の映画アイアンマンのように人間のパワーを上げるスーツや電動義手などを作りたいです.
代表的な研究テーマ
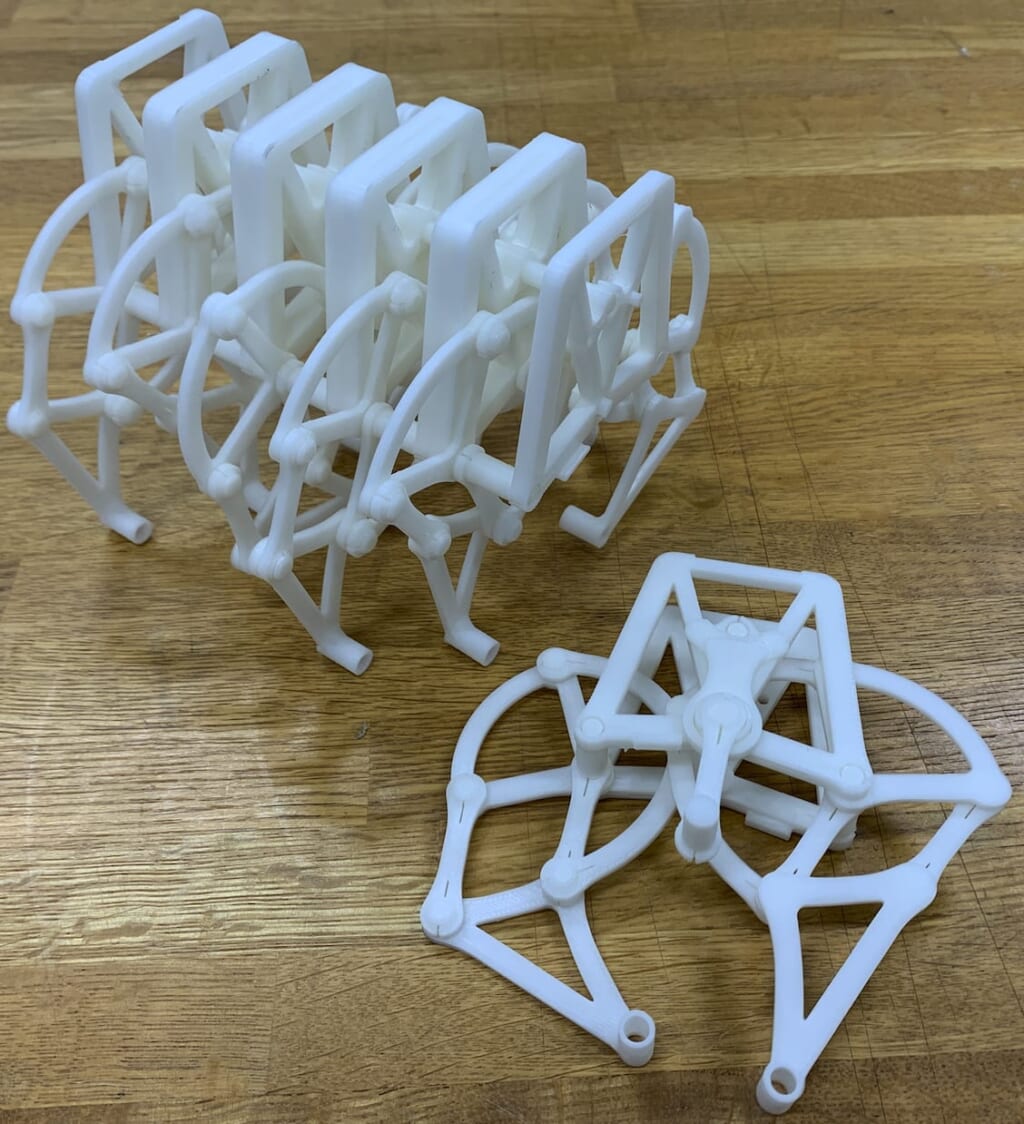
◎人腕の骨格モデルに基づいた多自由度電動義手の開発と臨床応用
本研究では、事故などで上肢の一部を失われた身体障がい者が物体とのインタラクションなど日常生活における殆どの作業を行うことができ、外観上にも本物の手と同様な多自由度電動義手の開発を目的とする。近年、申請者らはロボットハンドを製作し、筋肉の数式モデルを用いて粘弾性を制御することを提案している。このノウハウを応用し、①人腕の骨格モデルに基づいた電動義手を製作し、②機械学習をほとんど必要としない筋肉の数式モデルを用いて各アクチュエータの粘弾性を制御することで革新的な電動義手の基盤技術の構築を目指す。本研究によって身体障がい者向きの筋電電動義肢やリハビリなど臨床へ応用、そして、海底、宇宙環境で人間のように巧みに操作するロボットハンドへの応用も期待される。
 動画:https://youtu.be/fLA2RLsMeEo
動画:https://youtu.be/fLA2RLsMeEo
リンク
・機械コース: https://www.t-kougei.ac.jp/gakubu/engineering/mc/