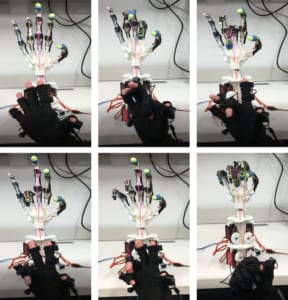
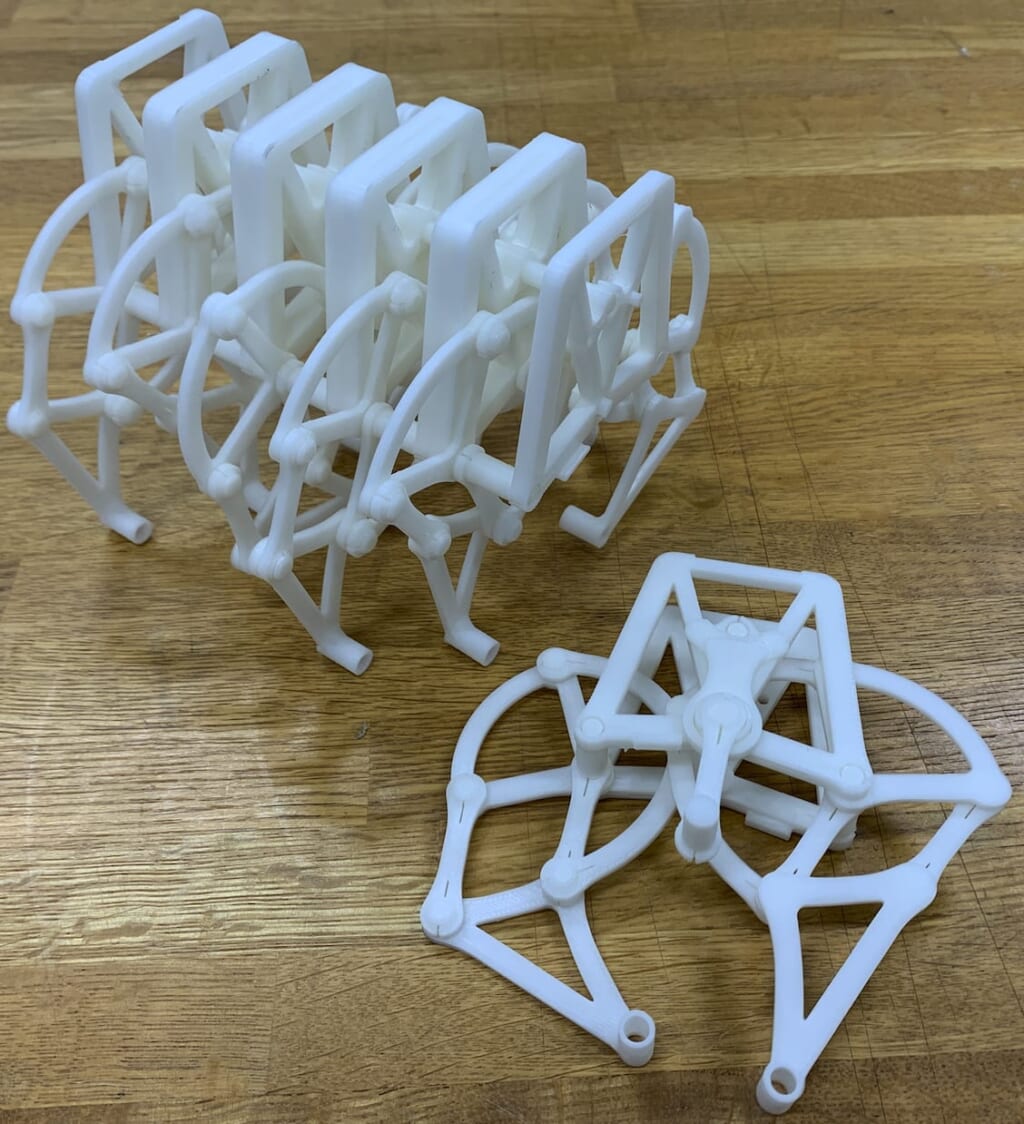
機能的な面を重視する従来の電動義手では人間の骨格系と異なるリンク構造を持っているのでシリコン皮膚を被せるだけでは皮膚の歪みが生じてしまい、患者が装着することを好まない問題点がある。そこで、本研究では、事故などで上肢の一部を失われた身体障がい者が物体とのインタラクションなど日常生活における殆どの作業を行うことができ、外観上にも本物の手と同様な多自由度電動義手の開発を行っている。(機械コース ウェアラブルロボット研究室)



機能的な面を重視する従来の電動義手では人間の骨格系と異なるリンク構造を持っているのでシリコン皮膚を被せるだけでは皮膚の歪みが生じてしまい、患者が装着することを好まない問題点がある。そこで、本研究では、事故などで上肢の一部を失われた身体障がい者が物体とのインタラクションなど日常生活における殆どの作業を行うことができ、外観上にも本物の手と同様な多自由度電動義手の開発を行っている。(機械コース ウェアラブルロボット研究室)




大学公式Webサイトで
工学部・芸術学部の詳細を見る