福井 貴大 助 教

専門分野 ロボティクス 脚移動ロボット 魚型ロボット
担当科目 工学基礎実験 機械基礎製図 機構学 センサ工学
・研究業績:福井貴大助教 研究業績その他
研究概要
ヒューマノイドや犬型4足ロボットなど,多くの動物型ロボットが開発されおり,凹凸や坂などを転倒せずに運動できるようになってきています.しかし,未だに実際の動物のように様々な環境において滑らかに動き回ることはできず,運動可能な環境は限定されています.その理由の一つは,生物の運動原理が完全には解明されていないことです.一方で,動物には運動のための神経回路が存在していることは解明されています.そこで,生物模倣ロボット研究室では,その運動のための神経回路を制御に用いることで,動物のように様々な環境で運動可能な移動ロボットの開発を目指しています.
代表的な研究テーマ
◎速度変化に対応可能なロボット開発
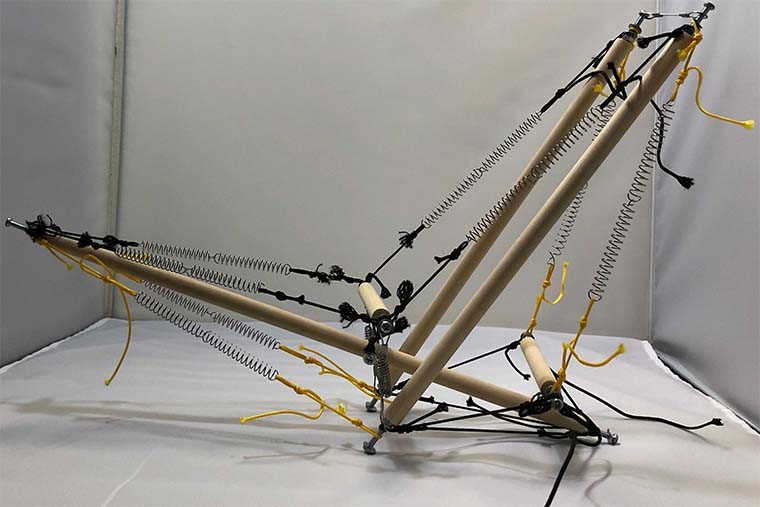
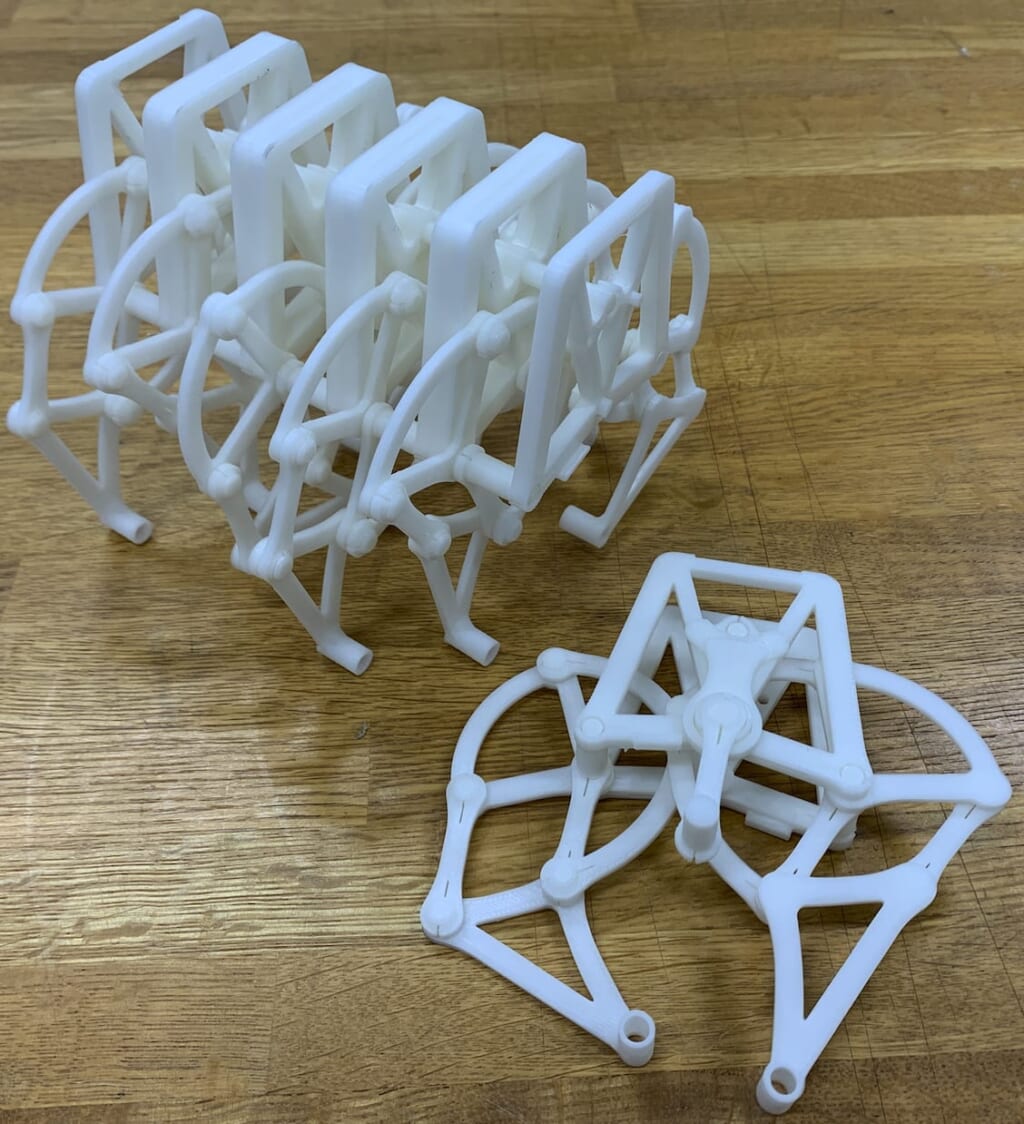
実際の4足動物は移動速度に応じて4脚を振り出す順番が変化し,様々な移動速度で自由自在に動き回ることができます.しかし,4足ロボットにおいて4脚を振り出す順番を予め決めておくことは困難であるため,移動速度によっては転倒することがあり,多くの4足ロボットは移動可能な速度域が限定されています.そこで,生物模倣ロボット研究室では,胴体傾斜角度センサとCentral Pattern Generator (CPG) と呼ばれる神経回路を用いることで,速度に応じて自動的に4脚を振り出す順番を決定し,様々な速度で運動が可能となる4足ロボットを開発しています.開発過程では,コンピュータシミュレーションを駆使した分析結果をもとにロボットの設計開発を進めています.

リンク
・機械コース: https://www.t-kougei.ac.jp/gakubu/engineering/mc/